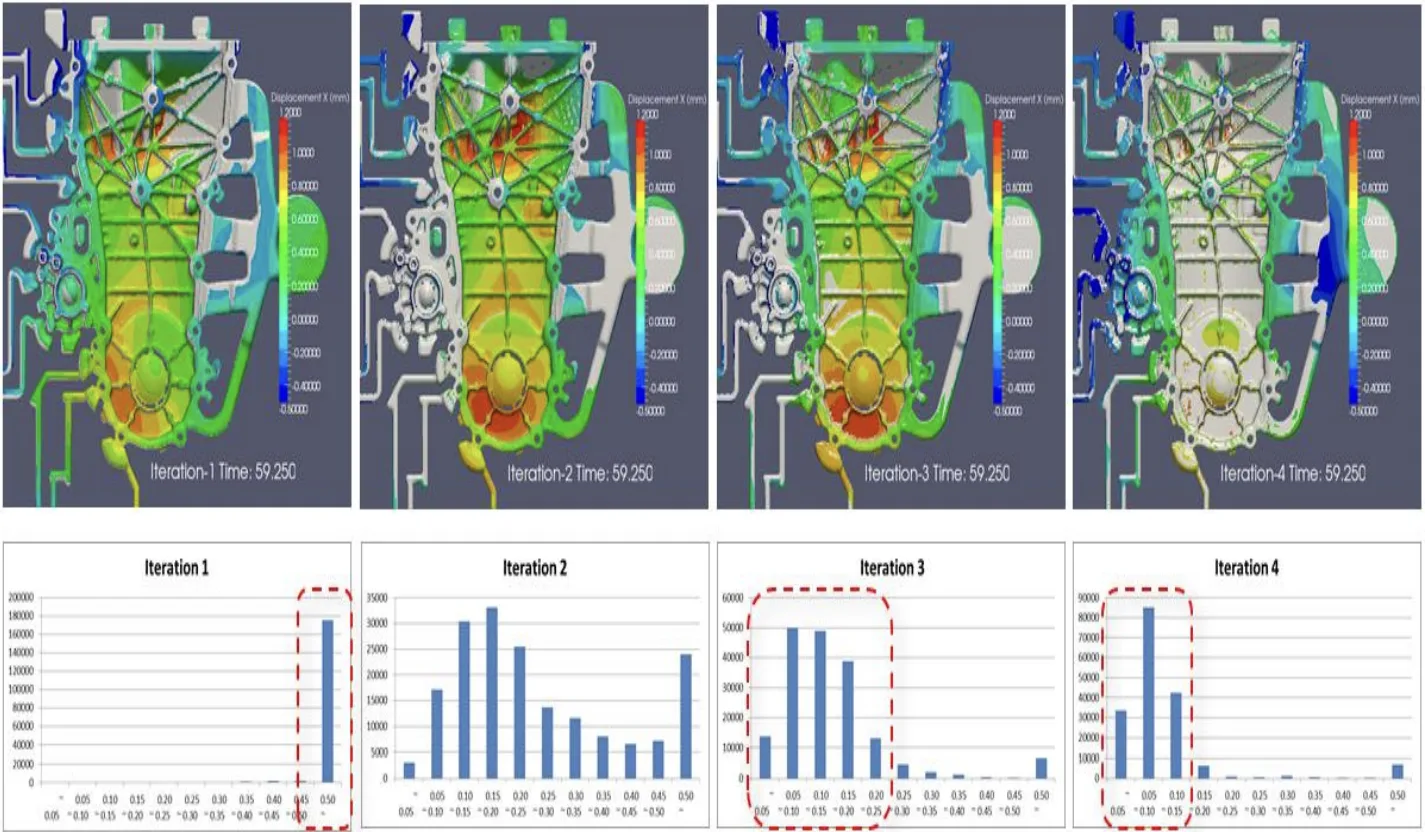
Published 05/02/2025 at 1425 × 832 in DEVELOPMENT AND APPLICATION OF CASTING DISTORTION & COMPENSATION TECHNOLOGY BASED ON AUTOMATIC ITERATION METHOD Figure 5 The compensation result after four iterations Figure 5 The compensation result after four iterations